This one's a work project, unlike the rest, which are all free time work.
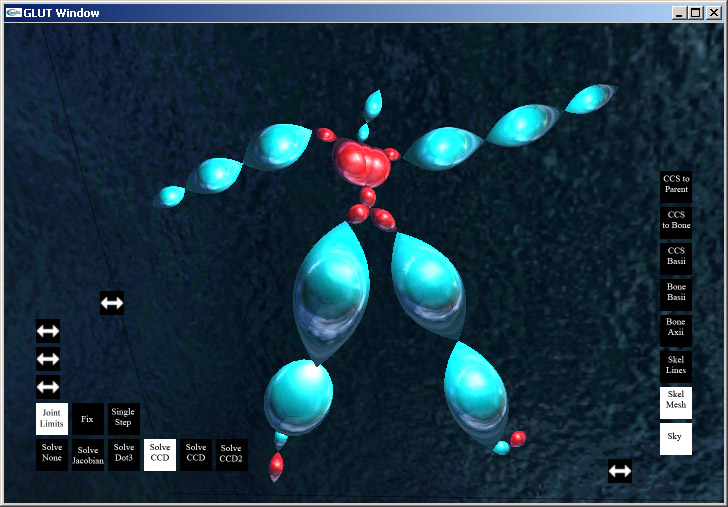
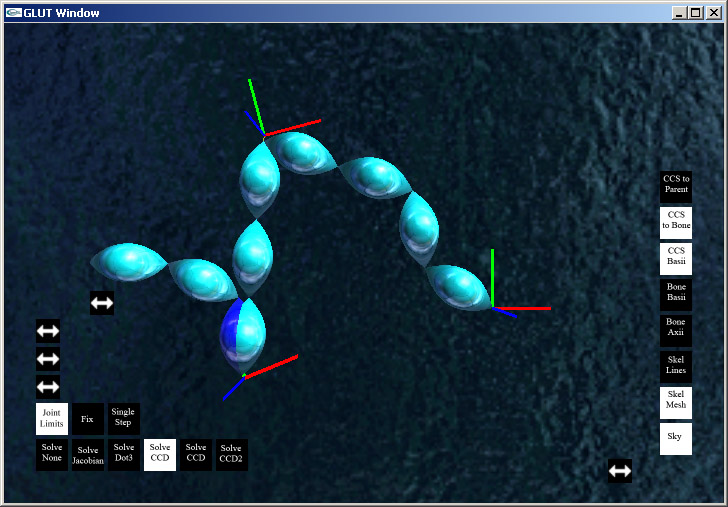
Included are solvers for the Jacobian method, simple dot/cross product angle method (the oh so famous Game Developer CCD method), and Chris Welman's CCD method (which works amazingly). Maybe later will come some other Jacobian / Least-Square methods, or who knows whatever else is out there . . . neural networks or real-time spacetime constraints or whatever.
There's still more room to grow though.
I've yet to post the source to this one. Its a GLUT dependancy, to warn you beforehand. The underlying framework is all incorperated. Its a bit parallel to my original framework, but much more tidy and OOP. Except for the vector math library. That's become a creature unto itself, capable of abstracting dynamically-allocated and statically-allocated vectors of arbitrary sizes running on either loops or template metaprograms. More on that hopefully later.